
|
|
文章詳情
組合握持機械手工作原理及結構設計應注意的問題 二維碼
1092
同位素分裝機是以PLC作為主控制系統,利用液壓缸作為主驅動動源,借助于各類機械手和裝置來完成系統內各部分的規定動作。釋放器裝入同位素后旋上大、小蓋部分的液壓控制系統及動作過程如圖1所示。 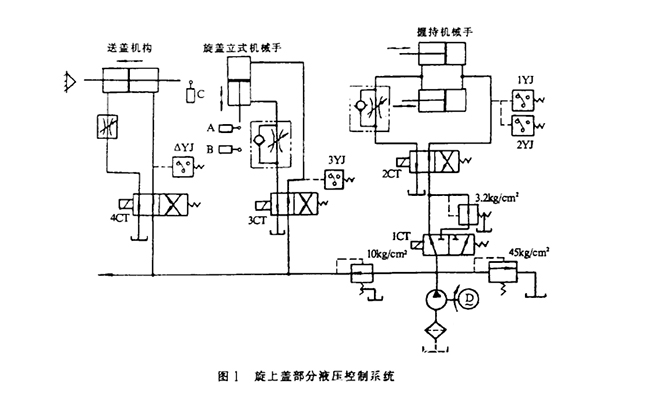 組合握持機機械手的結構如圖2所示,它采用兩個鉸支液壓缸作為動源分別驅動兩側手臂,這有利于減少其空間尺寸。在條件允許的情況下,也可改用一個液壓缸驅動。 首先,在液壓缸的元件腔通入較高壓力的油(45kg/cm2),活塞桿伸出推動小轉臂帶動大轉臂對合,大手頭夾緊保護筒后,將克服扭簧的彈簧力使小轉臂相對于大轉臂轉動。通過小轉臂端部的拔銷推動推桿,使小手頭對合,定位并夾緊釋放器。此時,在一側的調整墊處存在微小間隙量。  釋放器蓋旋入后,液壓缸的有桿腔進油,活塞桿回返,帶動大、小轉臂返回到原始位置。之后,液壓缸的無桿腔通入較低壓力的油(3.2kg/cm2),推動手臂重新對合。由計算可知,油壓較低,不足以壓縮扭簧,合緊后小手頭仍滯留在大手頭中間的導槽內。此時,大手頭夾緊保護筒,起著保護筒蓋落入時的導向作用。 保護筒旋入后,液壓缸的有桿腔二次進油,大、小手臂退回原位,完成一個工作循環。 在上述工作循環過程中,大手頭夾緊保護筒導向只利用較低油壓作用下,通過手臂的二次開合來完成,而沒有依靠扭簧力矩的反彈實現。這是因為手臂在運動過程由于多種因素的影響會產生較大的阻力矩(在受力分析中略去),使小手頭不能完全回退,故不影響大手的正常工作。這在實際操作中已經得到驗證。 結構設計中應注意的問題 扭簧的使用:圓柱螺旋扭轉彈簧在機構中多應用子運動部件,而在組合握持機械手中是作為動力部件使用的,由此省去兩個小手頭驅動液壓缸。以扭簧作為動力部件使用,由于其作用力值較大,往往其結構尺寸也較為龐大,會給設計帶來較多麻煩,乃至結構上無法實現。因此,設計時應根據其載荷大小,工作角度及可能具備的空間位置綜合考慮。當**工作轉角未68°,**工作轉角為68°,**工作扭矩小于2000kgmm時,在結構上較容易實現。 小手的導向:為防止小手頭及推桿在運動過程中產生擺動,確保手頭握持的位置度及運動的穩定性,對小手頭和推桿分別進行導向。這是一種過定位的導向形式,極易發生干涉而導致運動障礙。為此,手頭處的運動間隙量應當小于推桿導向處的間隙量。在設計中、小手頭導向處配合34H7/h6,推桿導向處配合為Φ20H7/g6,其對稱度為0.015mm。 小手頭握持中心的調整:小手頭夾握釋放器是以大手為基準進行定位,這可以減小基準的轉換誤差、提高其定位精度。在實際工作中,由于二個扭簧的力矩值不會均等,以及兩側構件運動阻尼的偏差,兩側手臂的運動不會同步;又由于各個簡體之間存在一定的偏差,所以,大、小手頭握持后其對中度應能夠調整。其調整過程是依靠修磨大、小手頭定位面之間的調整墊來完成的,調整墊厚度2.5mm。 蓋體落入時的緩沖:當蓋體落下時,蓋與相應的簡體之間會產生一定的沖擊。由于釋放器選用較硬的不銹鋼材料,且質量較小(約0.3kg),下落距離較短,所以不會影響其正常工作。而保護筒部分為銅質鉛夾層材料,其材質鉸軟、質量較大(3.2kg),且下落距離又略大于前者,因而,極可能破壞入口部分的工作螺紋,影響蓋體的旋入。為此,需要附設緩沖裝置。彈簧片沿導向壁對稱布置4個。在蓋體下落時,由于接觸并壓縮簧片而產生阻尼,減緩蓋體下落時的相互沖擊,避免構件損傷。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.hfsheji.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |