
|
|
文章詳情
液壓機械手握力的軟抓取控制及伺服驅動系統介紹 二維碼
1064
隨著科學技術的發展和生產實踐的需要,不僅要求搬運機器人能進行握力不變的剛性抓取,而且能實現握力可控制的軟抓取。在國內外各種機械手研制中,“軟抓”是一個令人感興趣的課題。本文介紹我們研制的具有二個自由度(提升和抓取)的液壓機械手。它能對不同重量的物體(小至一個空火柴盒,大至50N的鐵塊)進行軟抓取。該液壓機械手的電液伺服驅動系統為極化式雙向比例電磁鐵-伺服轉閥-液壓缸系統,具有體積小、輸出力大、靈敏度高、工作可靠、價格低的特點,很適合小型機械手上使用。  液壓機械手的結構: 圖1為液壓機械手的結構原理簡圖。采用兩套電液伺服系統分別控制機械手的提升和抓取。抓取缸活塞桿位移通過彈簧、滑塊和連桿機構控制手爪的夾持力,手爪為平行夾持型,手爪板可以更換,以便抓取不同形狀的物體。 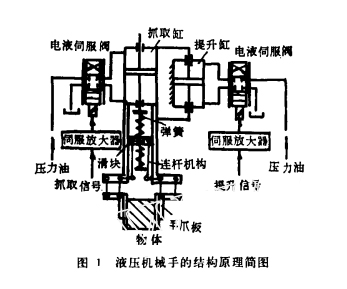 液壓機械手握力的軟抓取控制通過裝在手爪板上的滑覺、接近覺、接觸覺傳感器和微處理機來實現。 傳感器的研制: 為了實現“軟抓取”,必須隨時檢測出機械手與被抓物體間的狀態。這通過裝在手爪板上的滑覺、接近覺、接觸覺三種傳感器來實現。 滑覺傳感器: 它是三種傳感器中最關鍵的檢測元件,用來檢測物體在夾持過程中是否滑移。我們作了壓電式、電磁感應式、棘輪棘爪式和霍爾元件式滑覺傳感器的試驗。其中**種是利用壓電陶瓷間接檢測物體的振動來判斷物體是否發生滑移后三種是利用檢測磁場變化來判斷物體是否發生滑移。試驗表明,霍爾元件式**,它結構簡單、體積小、價格便宜、可靠性好,并且信號無需任何處理就可直接與微機相聯。其結構是采用多極扇形磁鋼,利用滾輪摩擦輪轉動時磁場變化,借助霍爾開關元件來檢測滑覺信號。 接近覺傳感器: 它的作用是當物體接近手爪板時發出信號。在此高效機械手上采用光電開關作為接近覺傳感器。當物體接近手爪時,光線被切斷,光電三極管發出信號。其特點是采用紅外光作為光源,不受自然光的影響,工作可靠。 接觸覺傳惑器: 它的作用是當手爪板與物體接觸時向微機發出信號,使夾緊動作停止,物體開始提升,并發出檢測滑移的指令。該機械手采用干簧管開關作為接觸覺傳感器,通過調整裝有小磁鋼的彈簧片的厚薄和彎曲程度,可以獲得很小的導通接觸力(小于0.1N)。實驗表明,干簧管的工作很可靠。 電液伺服驅動系統: 電液伺服驅動系統由伺服放大器、極化式雙向比例電磁鐵、伺服轉閥及液壓缸組成。其作用是將輸入的電信號變換成液壓缸活塞的相應位移。伺服放大器(包括激磁恒流源)是一臺具有電流負反饋的直流放大器。由于采用了電流負反饋,有效地克服了電磁鐵線圈電感和銜鐵運動時產生的反電勢,提高了電磁鐵的動態特性。 極化式雙向比例電磁鐵,它的作用是將電信號轉化為位移信號,推動小型伺服轉閥。它采用動鐵結構,恒定電流激磁,控制線圈采用差動連接方式,具有體積小、響應快(tr=2.7ms,ts=14.7ms)、線性度好(<1%)、頻寬較高(一3dB為145Hz)的特點。 伺服轉閥采用本室研制的電液伺服擺動馬達的閥芯和閥套改裝而成。該伺服轉閥的閥口開閉用來控制提升液壓缸和抓取液壓缸的運動。液壓缸它是電液伺服驅動系統中的執行元件。輸出是活塞的位移。此液壓缸采用雙出桿型式。 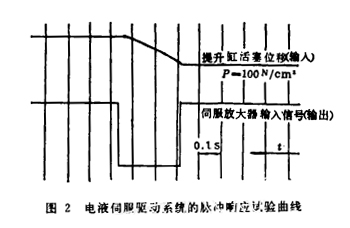 圖2是電液伺服驅動系統對脈沖響應的試驗曲線。由于液壓缸是積分環節,所以活塞位移是一條斜線。由圖可見,響應平緩,無超調量。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.hfsheji.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |